智能网联车(XMOVE)
XMOVE四轮移动小车是一款适用于机器人工程和相关专业的教学、竞赛与二次开发装备。采用四轮驱动方式,转弯半径小并且具备一定的爬坡和越障能力,通过性能出色。底层驱动采用自主设计的STM32核心多路电机驱动板,控制系统采用英伟达Jetson NANO套件,标配深度视觉、双彩色相机和激光雷达。除此外还预留硬件接口,可扩展超声波、红外和手臂套件。可以支持如《嵌入式系统原理及应用》《机器视觉与图像处理》《机器人操作系统》《SLAM与自动导航》和《人工智能基础》等课程的课代实验和综合项目实践。
产品简介
- 四轮驱动,移动和爬坡越障性能出色;
- 底层驱动采用STM32核心多路电机驱动板,控制系统采用英伟达Jetson NANO套件;
- 标配深度视觉、双彩色相机和激光雷达;
- 标配显示器和飞鼠,可脱离电脑,使用和学习更加方便;
- 预留接口,可扩展超声波、红外和手臂等传感器及上层执行机构;
- 系统基于ROS,提供开源SDK和软硬件接口,便于教学和二次开发;
- 提供开源应用案例与定制化实践项目课程。
教学应用
支持课程
《机嵌入式系统原理及应用》《机器人操作系统》《python程序设计》《机器视觉与图像处理》《SLAM与导航》《人工智能基础》等
实验项目
- 基ROS基本操作
- 移动机器人控制实验
- 激光雷达驱动与滤波实验激光雷达避障实验
- 轮式里程计与imu数据融合实验
- 基于里程计的运动标定实验
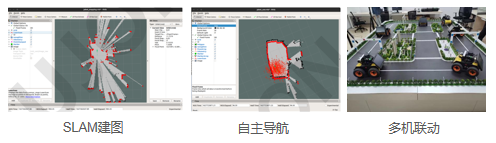
- SLAM建图
- 自主导航
- 单目相机驱动实验
- 单目相机参数标定实验
- 基于OpenCV的人脸识别实验
- 基于OpenCV的视觉巡线实验
- OpenCV视觉二维码检测
- 基于KCF的目标跟踪
- 多机器人通信
- 多机器人联动
......